Topics of the course
Basic vector-space properties of twists and wrenches: physical interpretation of the linear operations; linear dependence and independence, subspaces; bases and coordinates. (Lecturer: Dimiter Zlatanov)
Scalar products, dual spaces, reciprocity. Constraint and freedom in mechanisms. Constraint analysis. Type synthesis of single-loop mechanisms and parallel manipulators. (Lecturers: Xianwen Kong and Dimiter Zlatanov)
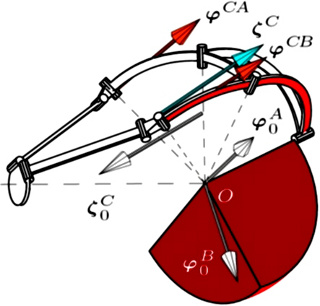
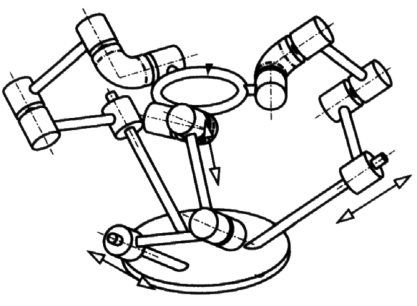
Velocity and singularity analysis of parallel and interconnected-chain mechanisms. Derivation of input-output velocity equations and singularity conditions. (Lecturers: Matteo Zoppi and Dimiter Zlatanov)
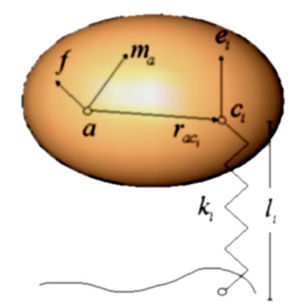
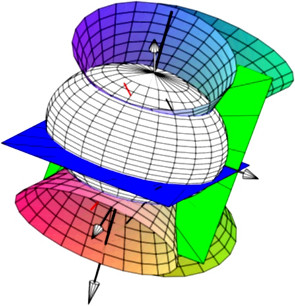
Mappings between screw spaces, stiffness and inertia. Structure of robot compliance. Eigenvalue problems and eigenscrews. Synthesis with springs. (Lecturer: Harvey Lipkin)
6D formulation of the dynamics of individual rigid bodies and rigid-body systems. Equations of motion. Dynamics algorithms. (Lecturer: Roy Featherstone)
Basic Lie group theory, matrix representations of the group of rigid-body displacements. Lie algebras as related to screw theory. The exponential map and its applications in modern robotics (Lecturer: Jon Selig).